Motorreductores
|

|
 |
- Relación de engranajes 100:1
- Rango de alimentación: 3 a 9 V (no se recomienda alimentarlo a la máxima tensión)
- Velocidad: 320rpm @ 6V
- Consumo sin carga: 80mA @ 6V
- Consumo con carga: 1600mA @ 6V
- Torque de: 2.2 kg-cm (9 oz-pulgadas)@ 6V
- Tamaño: 24 x 10 x 12 mm
|
- Modelo TGP01D-A130
- Motor DC: -Imán permanente -Escobillas de carbón -Eje biaxial
- Voltaje de operación: 3V~6V
- Corriente de operación: 100mA (sin carga) y 200mA (con carga)
- Caja reductora (piñonería plástica): 1:48
- Velocidad: 9800rpm (sin carga) y 220rpm (con carga)
- Torque: 0.5KgrCm
- Tamaño: 6.92cm x 2.25cm x 1.88cm
- Peso: 35 gramos
|
Motorreductores o reductores de velocidad son elementos mecánicos muy adecuados para el accionamiento de todo tipo de máquinas y aparatos de uso industrial, que se necesiten reducir su velocidad de una forma eficiente, constante y segura. Robot seguidor de Luz y linea, robot caminantes, ascensores, puentes, puertas, Robot gusano y carros inalambricos.
Puente H

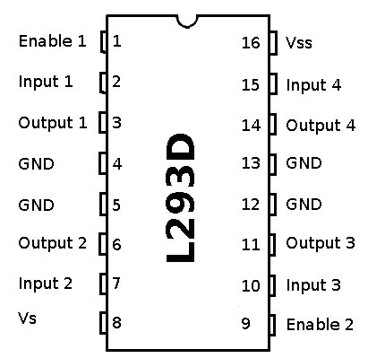
Un Puente en H es un circuito electrónico que permite controlar a un motor eléctrico DC girar en ambos sentidos, avance y retroceso. Adicionalmente permite administrar la corriente que requieren los motores, Arduino provee salidas de hasta 40mA y los motores requieren alrededor de 300 y 350 mA.
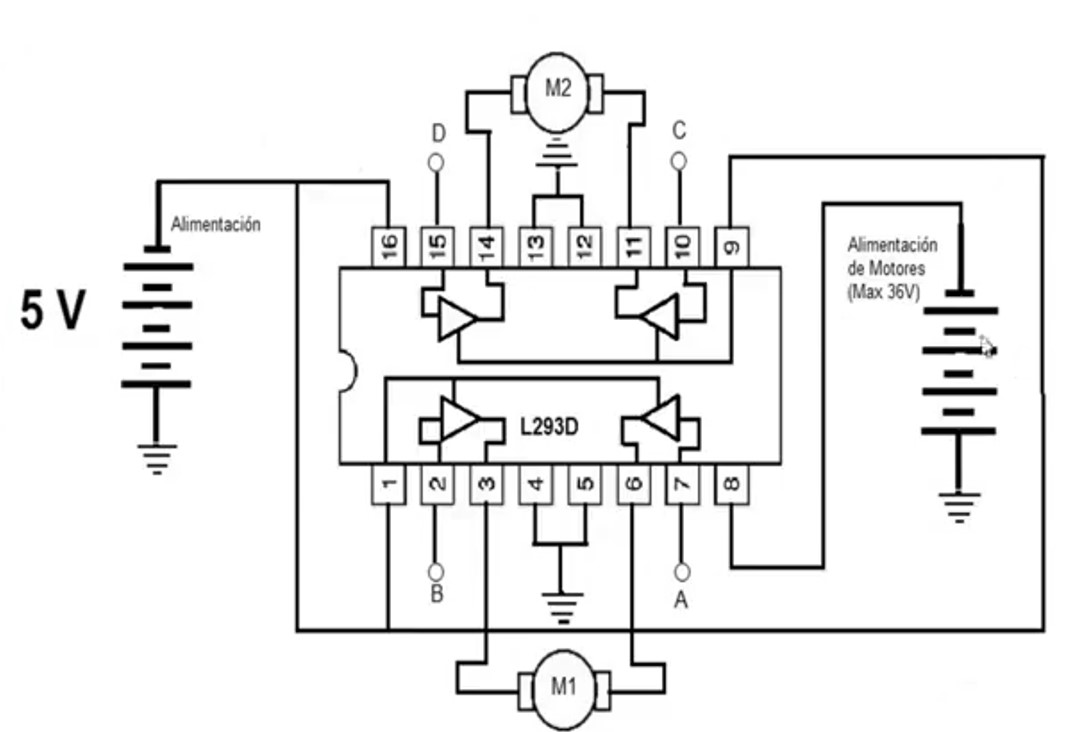
Esquema Puente H
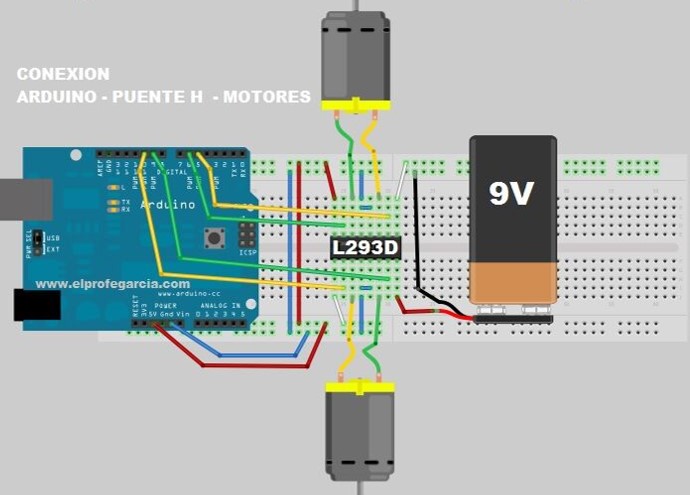
Montaje
Sketch
/* Prueba del Puente H (L293D)
ARDUINO L293D(Puente H)
5 10
6 15
9 7
10 2
5V 1, 9, 16
GND 4, 5, 12, 13
El motor 1 se conecta a los pines 3 y 6 del Puente H
El motor 2 se conecta a los pines 11 y 14 del Puente H
La fuente de alimentacion de los Motores se conecta a tierra y
el positivo al pin 8 del puennte H.
*/
int izqA = 5;
int izqB = 6;
int derA = 9;
int derB = 10;
int vel = 255; // Velocidad de los motores (0-255)
int pinZum = 2;
void setup() {
pinMode(derA, OUTPUT);
pinMode(derB, OUTPUT);
pinMode(izqA, OUTPUT);
pinMode(izqB, OUTPUT);
pinmode(pinZum, OUTPUT);
}
void loop() {
// Frente 2 segundos
analogWrite(derB, 0);
analogWrite(izqB, 0);
analogWrite(derA, vel);
analogWrite(izqA, vel);
delay (2000);
// Derecha 0,5 segundos
analogWrite(derB, 0);
analogWrite(izqB, 0);
analogWrite(derA, vel);
analogWrite(izqA, 0);
delay (500);
// Izquierda 0,5 segundos
analogWrite(derB, 0);
analogWrite(izqB, 0);
analogWrite(derA, 0);
analogWrite(izqA, vel);
delay (500);
// Detiene los Motores
analogWrite(derB, 0);
analogWrite(izqB, 0);
analogWrite(derA, 0);
analogWrite(izqA, 0);
delay (500);
// Reversa 2 segundos
analogWrite(derA, 0);
analogWrite(izqA, 0);
analogWrite(derB, vel);
analogWrite(izqB, vel);
digitalWrite(pinZum, HIGH);
delay (100);
digitalWrite(pinZum, LOW);
delay (100);
digitalWrite(pinZum, HIGH);
delay (100);
digitalWrite(pinZum, LOW);
delay (2000);
}
int izqA = 5;
int izqB = 6;
int derA = 9;
int derB = 10;
int vel = 255; // Velocidad de los motores (0-255)
void setup() {
pinMode(derA, OUTPUT);
pinMode(derB, OUTPUT);
pinMode(izqA, OUTPUT);
pinMode(izqB, OUTPUT);
}
void loop() {
// Frente 2 segundos
analogWrite(derB, 0);
analogWrite(izqB, 0);
analogWrite(derA, vel);
analogWrite(izqA, vel);
delay (2000);
// Derecha 0,5 segundos
analogWrite(derB, 0);
analogWrite(izqB, 0);
analogWrite(derA, vel);
analogWrite(izqA, 0);
delay (500);
// Izquierda 0,5 segundos
analogWrite(derB, 0);
analogWrite(izqB, 0);
analogWrite(derA, 0);
analogWrite(izqA, vel);
delay (500);
// Detiene los Motores
analogWrite(derB, 0);
analogWrite(izqB, 0);
analogWrite(derA, 0);
analogWrite(izqA, 0);
delay (500);
// Reversa 2 segundos
analogWrite(derA, 0);
analogWrite(izqA, 0);
analogWrite(derB, vel);
analogWrite(izqB, vel);
delay (2000);
}
